El Rover del Mars Pathfinder
Sojourner Truth
En el 30 aniversario de la exploración robótica de Marte, NASA seleccionó
el nombre "Sojourner" para el primer rover que explorará el Planeta Rojo.
El explorador robótico de 11,34 Kg y 6 ruedas, luego de que el módulo de
aterrizaje llegó al planeta el 4 de Julio de 1997, bajó a la superficie
para moverse sobre el Ares Vallis, una antigua planicie de inundación Marciana.
La nave Mariner 4, de los Estados Unidos, inició el estudio de la humanidad
sobre el Planeta Rojo hace ya 30 años, cuando se acercó a Marte a una
distancia de 9.656 Km, el 14 de Julio de 1965, tomando las primeras
imágenes cercanas de otro planeta.
El nombre Sojourner fue escogido para el rover del Mars Pathfinder luego de
una competencia mundial de un año, en la que estudiantes de hasta 18 años
fueron invitados a seleccionar una heroína y someter un ensayo acerca de
sus logros históricos. Se pidió a los estudiantes incluir en sus ensayos
cómo un rover planetario llamado como su heroína emularía sus logros en
la superficie Marciana.
Valerie Ambroise, de 12 años, de Bridgeport, Connecticut, sometió el ensayo
ganador sobre Sojourner Truth, una reformista Afro-Americana que vivió
durante la era de la Guerra Civil. Una abolicionista y campeona de los
derechos de la mujer, Sojourner Truth, cuyo nombre legal era Isabella Van
Wagener, hizo su misión el "viajar a todo el país", abogando por el derecho
de todas las personas a ser libres, y por los derechos de la mujer para
participar completamente en la sociedad. El nombre Sojourner fue
seleccionado porque significa "viajero". Los científicos e ingenieros del
JPL que trabajan en el proyecto Mars Pathfinder y miembros del staff de la
Sociedad Planetaria revisaron un total de 3.500 ensayos recibidos de todo
el mundo, incluyendo ensayos de estudiantes del Canadá, India, Israel,
Japón, México, Polonia y Rusia.
El Rover Sojourner
 Sojourner es un pequeño vehículo robótico de 6 ruedas construido en el Jet
Propulsion Laboratory. Pesa 11,5 Kg y su tamaño es de 65 cm de largo por
18 cm de alto. El Sojourner aterrizó en Marte abordo de la nave Pathfinder,
pero pronto salió por su cuenta para recorrer el terreno Marciano, hacer
experimentos de ciencia y tecnología, y transmitir imágenes y datos hacia
el módulo de aterrizaje. El módulo de aterrizaje entonces los
re-transmitirá a los científicos e ingenieros que los esperan en la Tierra.
Sojourner es un pequeño vehículo robótico de 6 ruedas construido en el Jet
Propulsion Laboratory. Pesa 11,5 Kg y su tamaño es de 65 cm de largo por
18 cm de alto. El Sojourner aterrizó en Marte abordo de la nave Pathfinder,
pero pronto salió por su cuenta para recorrer el terreno Marciano, hacer
experimentos de ciencia y tecnología, y transmitir imágenes y datos hacia
el módulo de aterrizaje. El módulo de aterrizaje entonces los
re-transmitirá a los científicos e ingenieros que los esperan en la Tierra.
Aún cuando el Sojourner requiere sólo cerca de cuatro días para completar
su misión primaria, está diseñado para sobrevivir en las frías noches
Marcianas (que llegan a -120°C) por muchos meses.
El Panel Solar del Rover:
Por supuesto, todo el equipo del Sojourner, incluyendo sus computadoras,
lásers, y módem de radio, requieren energía. El Sojourner genera la mayor
parte de ella usando un panel solar de bajo peso. El panel es fácilmente
visible como un panel plano montado en la parte superior del rover.
El panel está hecho de una "matriz" de más de doscientas celdas solares
fotovoltaicas. Cada celda es de cerca del tamaño de una hojilla de afeitar
de doble filo. Las celdas son muy livianas, delgadas y frágiles.
Conectando eléctricamente estas celdas en cadenas, la matriz solar proveerá
al Sojourner con cerca de 16 watt de energía durante el mediodía Marciano.
Eso equivale a la energía utilizada por una lámpara de horno casero, y sin
embargo, permite al eficiente rover realizar casi todas sus actividades
nominales durante la misión.
Las Baterías del Rover:
Durante los momentos cuando hay poca o ninguna luz Solar para el panel, el
Sojourner puede usar baterías para alimentar su hardware. Las baterías se
usan cuidadosamente, puesto que almacenan una cantidad limitada de energía,
y una vez agotadas, no son recargables. Se las usa principalmente para
experimentos nocturnos, y operaciones temprano en la mañana Marciana, pero
también proveyeron la energía para las periódicas comunicaciones del rover
("chequeos de salud") durante los siete meses de viaje desde la Tierra.
Las tres baterías están ocultas dentro de la caja dorada con la electrónica
del rover, montada debajo del panel solar. Cada batería parece el tubo de
una linterna (sin las puntas), y cada tubo contiene tres celdas tamaño D en
su interior. Los tubos están sujetados juntos alrededor del eje de la
suspensión del rover, que corre a través del centro de la caja de electrónica.
Si fallaran las baterías o el panel solar, el rover puede completar su
misión usando la otra fuente de energía.
Electrónica de Potencia:
La energía generada por el panel solar y las baterías es acondicionada y
distribuida usando un complejo conjunto de electrónica de potencia. Esta
electrónica está completamente integrada con la de navegación y computación,
para ahorrar dinero, espacio, y masa, y sin embargo provee más de diez
diferentes voltajes al variado hardware del rover. La mayor parte de los
componentes electrónicos utilizados en la electrónica de potencia están
disponibles comercialmente.
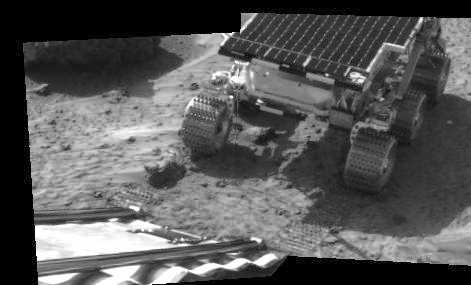
"Seis ruedas en el suelo!" La imagen de arriba fue tomada por la cámara IMP
el 5 de Julio de 1997 (Sol 2). El descenso del Sojourner por la rampa
trasera de salida fue exitoso. El viaje de siete meses del microrover de la
Tierra a Marte está completo. El suelo debajo del Sojourner (mostrando
huellas detrás de la rueda trasera derecha) será el primer blanco para el
Espectrómetro de Protones Alfa de Rayos-X.
La imagen de arriba muestra al Rover Sojourner haciendo su examen de
"Barnacle Bill" con el APXS. Esta imagen fue tomada por la cámara IMP
completamente desplegada (a 1,8 m de altura) durante el Sol 4 (Julio 7,
1997).
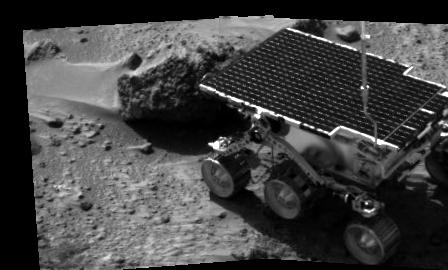
En la imagen de arriba, tomada con la cámara IMP a las 8:45 p.m. PDT durante
el Sol 6 (Julio 10, 1997), el Sojourner ha hecho contacto con la roca Yogi.
La rueda trasera izquierda del rover ha subido por la superficie de Yogi en
un intento de acercarse todo lo posible a la superficie de la roca. Note
las huellas dejadas por el rover al dar la vuelta para acercarse.
El Sojourner luego utilizará su Espectrómetro de Protones Alfa de Rayos-X
(APXS) para hacer un estudio de la composición química de Yogi.

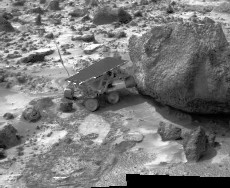
En la imagen de arriba, tomada con la cámara IMP durante el Sol 18 (Julio
21, 1997), el Sojourner ha hecho contacto con la roca Yogi. Muestra
claramente la superficie de dos tonos de este peñasco. La naturaleza de
esta diferencia de colores es desconocida, sin embargo. Podría consistir de
polvo que, soplado por el viento, se ha acumulado sobre su superficie (la
roca está inclinada en la dirección del viento prevaleciente), o podría ser
evidencia de la fragmentación de un peñasco mayor al ser depositado durante
la antigua inundación que formó cauces en este área.
Note las huellas dejadas por el rover al dar la vuelta para acercarse.
El Sojourner ha utilizado su Espectrómetro de Protones Alfa de Rayos-X
(APXS) para hacer un estudio de la composición química de Yogi.
Una versión diferente, de mayor resolución, de esta imagen (65KB), puede
obtenerse en las páginas del Mars Pathfinder en:
Mars Pathfinder Mission
(NASA-JPL y todos los otros sitios, en Inglés)
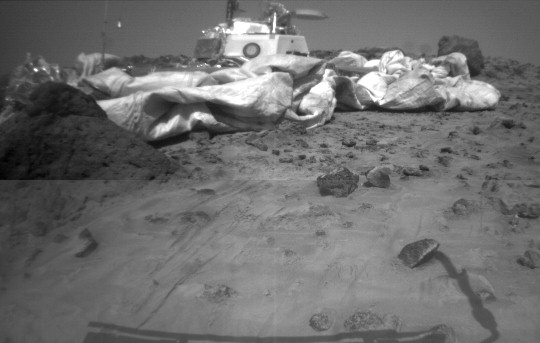
En la imagen de arriba, tomada por el Rover Sojourner, puede ver al módulo
de aterrizaje del Mars Pathfinder con sus bolsas de aire. El objeto con
forma de plato es la antena de alta ganancia, el brillante cilindro
vertical es la antena de baja ganancia, y la parte inferior del mástil
de la cámara IMP está a su izquierda, el mástil de las mangas de viento
está aún más a la izquierda.
La roca 'Mini Matterhorn' está al lado izquierdo. Las sombras en primer
plano, abajo, son del borde del panel solar del rover y de su antena. La
roca Yogi está a la derecha, detrás de las bolsas de aire.
Una versión diferente, de mayor resolución, de esta imagen (146 KB), puede
obtenerse en las páginas del Mars Pathfinder en:
Mars Pathfinder Mission
(NASA-JPL y todos los otros sitios, en Inglés)
Actualizada: Julio 31 '97
Optimizada para ser vista con MS Internet Explorer.
Regreso a la página de la
Misión Mars Pathfinder en ARVAL
Mensajes:
Comunicaciones